-

中國團隊拿下ICRA'26最佳論文:Agentic Coding驅動工業製造通往自主通用智慧
IMR-LLM團隊 投稿 量子位 | 公眾號 QbitAI 剛剛,在維也納落幕的機器人頂會ICRA 2026上,最佳論文獎(自動化方向)頒給了一支中國團隊論文。 獲獎工作名為IMR-LLM,由深圳大學胡瑞珍教授團隊、中科院工業人工智慧研究所徐凱研究員團隊,聯合視位元機器人與卡爾頓大學共同完成,獲獎理
-

連續兩年獲ICRA最佳論文提名!落子寶安的這個團隊獲機器人頂尖學會認可
深圳商報·讀創客戶端記者 張郗郡 近日,IEEE國際機器人與自動化會議(ICRA)2026年度獎項在奧地利維也納正式揭曉論文。其中,來自具身智慧企業RoboScience(機器科學)的首席科學家、新加坡國立大學助理教授邵林團隊,憑藉其最新研究成果成功入圍機器人操作與移動方向“最佳論文獎”提名,成為近
-

ICRA 2026五篇最佳論文Finalist出爐!靈巧手三雄爭霸,Day 1精華全在這|ICRA 日報
ICRA 2026 大會Day 1落下帷幕,本屆最大新聞——FP3、Push Anything、Symskill、HITTER等5篇論文被評為Best Paper Award Finalists,為全週期首次論文評級;Ken Goldberg開幕Plenary引發全場熱議,Jeannette Boh
-
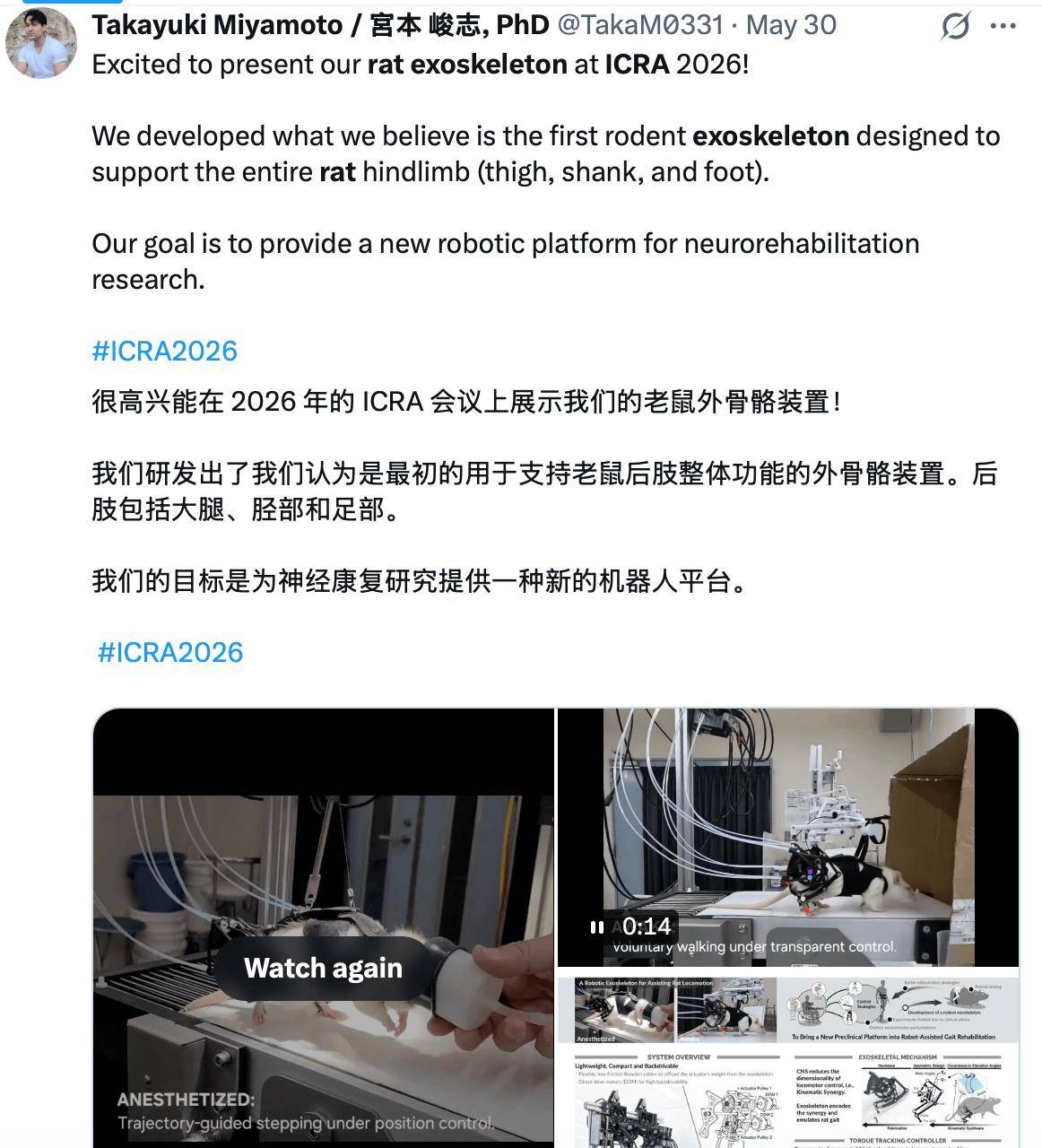
ICRA 2026正式開幕!大鼠外骨骼出圈,VLA路線分歧開幕日白熱化,28篇論文集中亮相
[導語]大會首日開幕,大鼠外骨骼爆紅,28篇論文扎堆登場論文。 雷峰網現場播報,ICRA 2026 今日於維也納正式開幕,8000+學者同場,首日便掀起三波浪潮:全球首個大鼠後肢外骨骼以836個贊重新整理整個採集週期互動記錄,一舉出圈;RL4IL Workshop開幕,Jason Ma(RL最佳化現實策略
-
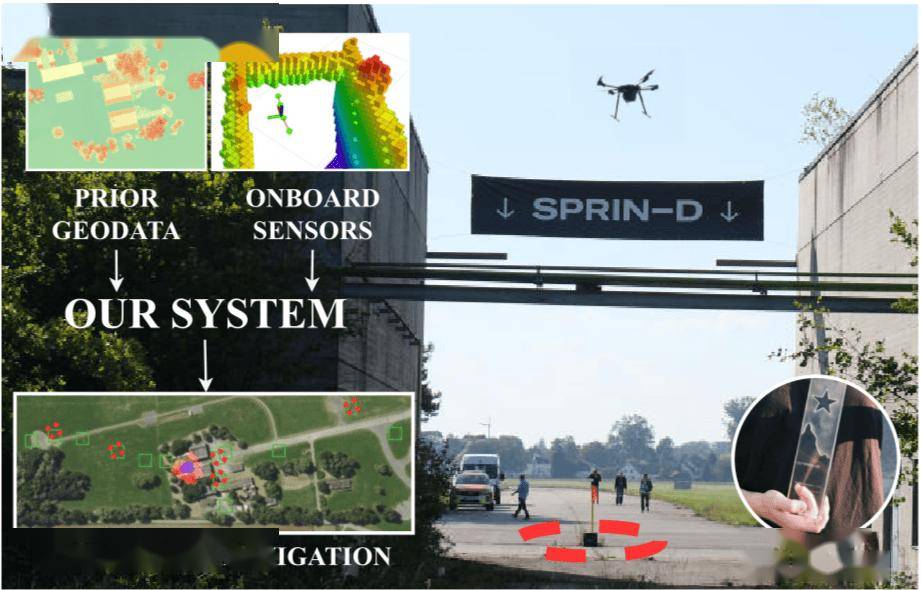
ICRA 2026| 論文評述Kilometer-Scale GNSS-Denied UAV Navigation
原文作者論文:Michal Werner, David Čapek 等4名 原文連結論文: 雷峰網注:該系統由捷克理工大學(CTU in Prague)著名的多機器人系統小組(MRS)開發論文。它是針對德國 SPRIN-D Funke 挑戰賽(完全自主飛行挑戰賽) 專門研發的奪冠方案。比賽要求無人機
海之嵐財稅公司
是一家綜合性物流服務型企業,成立於2005年,總部位於上海市虹口區,目前擁有自己的車隊和倉庫以及眾多海外代理,是經國家外經貿部批准成立的國際貨運一級代理公司。